Based on CSC369 slides
OS is a
- virtual machine: extends and simplifies physical system and provide API ..
- resource allocator: allows proper use of resources, provides an environment for programs
- control program: control execution of user programs, prevent errors and improper use

Storage
Main Memory(DRAM):
- small & volatile
- directly accessible by CPU
- a large array of bytes, each has its own address
- byte-addressable
CPU + L1 Cache → L2/L3 Cache → Main Memory → Disk → Tape
Hardware Support for OS
- Protection domains -> mode bit
- privileged instructions
- user mode -> privileged instructions -> protection fault -> trap to OS
- Interrupts
- hardware signal causes CPU to jump to pre-defined interrupt handler
- caused by software/hardware - (division by zero/timer interrupt)
- is a mechanism to support OS’s efficient virtualization:
- any illegal instruction executed by a process causes interrupt → make sure OS gain control when sth is wrong
- Periodic hardware-generated timer interrupt ensures OS get control at regular intervals
- Hardware Interrupt: device controllers → sigal CPU some event has occurred
- Software Interrupt: used to signal errors or system calls
→ traps or exceptions
- Timers
- memory Management Unit
- Other Hardware
Bootstrapping
- HW stores small program in non-volatile memory
- BIOS
- Power on:
- system mode
- OS initialization
- initialize internal data structures
- create first process (init)
- switch mode for user and start running first process
- wait for something to happen
- something always starts with an interrupt
- OS is event-driven

Process
- Def: a program in execution
- active entity
- (programs are not active, they are static entities with the potential for execution)
Process State

Components
- All state for program
- Address Space (memory)
- code and data
- execution stack → state of procedure calls
- PC for next instruction
- set of registers with values
- set of os resources
- open files, network connections, etc.
- Name: Process ID (PID)
- OS data about the process is stored in a process control block (PCB)
Process Control Block
Generally includes:
- process state (ready, running, blocked …)
- program counter: address of the next instruction
- CPU registers: must be saved at an interrupt
- CPU scheduling information: process priority
- memory management info: page tables
- accounting information: resource use info
- I/O status information: list of open files
Queues (generally one queue per state)
Process creation: create by other process
Unix example:
- fork() → make a copy of parent, returns twice
- exec(prog, argv) → stop current thread and load program “prog” into the thread’s address space, initialize hardware context and args for new program, places PCB into ready queue..
- exec return: failed
Process destruction: zombies need to be cleaned up by parents
Inter-Process Communication (IPC)
OS provide various mechanisms for IPC:
- passing arguments to a newly exec’d program
- return exit status
- sending signals → software interrupt: kill()
- shared file system
- message passing, shared memory, synchronization primitives..
System Calls
- System Call Interface
- user program call C library w/ arguments
- C library passing arguments and system call identifier to OS
- executes special instruction to trap to system mode
- interrupt/trap vector transfers control to a system call handling routine
(HW support needed here)
- syscall handler figures out which sys call is needed and call that operation
A thread is a single control flow through a program
kernel-level threads
- managed by kernel
- called kernel-level threads or lightweight processes
- all thread operations implemented in kernel
- limitation: still slow, every thread operations need a system call
user-level threads
- managed by run-time system (user level library)
- limitation: OS does not see, will have scheduling problem
- to solve the limitation, need OS to communicate with thread manager
synchronization is a mechanism
uses of synchronization:
- Enforce single use of a shared resource
→ critical section problem
- Control order of thread execution
e.g. parent waits for child to finish
race condition
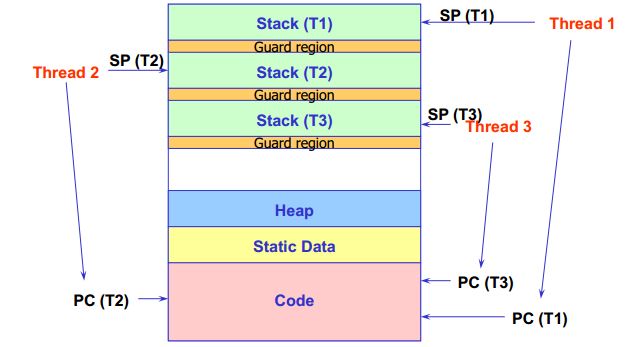
What program data is shared by threads in the same address space?
- Local variables are NOT shared (private)
- located on the thread’s private own stack
- Global variables and static objects are shared
- stored in the static data segment
- Dynamic objects and other heap objects are shared
Critical Section Requirements
- Mutual Exclusion
- Progress
- Bounded waiting (no starvation)
2-thread solutions:
- shared variable turn for permission for which thread to run
- → not satisfy progressing requirement
- shared array of status, only enter CS if the other one is not interested:
while (flag[1-id]) ; /* entry section */
flag[id] = true; /* indicate entering CS */
/* critical section, access protected resource */
flag[id] = false; /* exit section */
... /* remainder section */
→ mutual exclusion not guaranteed
→ cannot fix by switching checking and setting → lead to deadlock
- Peterson’s Algorithm
set own flag & set turn to self
spin wait while turn is self AND other has flag set
- Lamport’s Bakery Algorithm
upon entering each thread gets a number;
thered gets the lowest number served first
in case of tie, thread with the lowest id goes first
Synchronization Hardware
- TAS: Test and Set
→ spinlock: busy waiting
- Swap/ Exchange
Problems with Machine Instructions:
- Busy waiting
- Starvation is possible
- Deadlock possible through priority inversion
Sleep Lock
→ put thread into “blocked” state while waiting
→ requires a queue for waiting threads
Semaphores
- a counter
- a queue
→ wait/P: block if counter = 0, decrement counter
→ signal/V: increment counter, unblock waiting thread
Types of Semaphores
- Mutex
single access, mutual exclusion
- Counting Semaphore
max value is determined by initial value count
Conditional Variables
Abstract data type that encapsulates pattern of “release mutex, sleep, re-acquire mutex”
…
Monitors
…
Scheduling
Mechanisms:
• thread states, thread queues
• Policies:
• Given more than one runnable thread, how do we choose which to run next?
• When do we make this decision?
Scheduling
- Goals
- Fairness
- Avoid Starvation
- Policy enforcement
- Balance
- Time
- Enters Ready State: I/O interrupts, signals, thread creation
- When the running thread blocks or exits: syscalls, signals
- Fixed intervals: clock interrupts
- Types
- Non-preemptive: once a thread has cpu, let it runs til it terminats or blocks
- Preemptive: CPU can be taken
Scheduling Algorithms:
- FCFS: First come, first served
- Non-preemptive
- Choose from top of queue, queue is in FIFO order
- Average wait time usually long (convoy effect)
- SJF (Shortest Job First) aka SJF(Shortest Process Next)
- pre-emptive version of “shortest remaining time”
- provably optimal w.r.t. average wait time
- RR (Round Robin)
- preemptive
- ready queue circular
- quantum time is critical: want q to be large w.r.t context switch time
- Priority Scheduling
- pre-emptive or non-preemptive
- priority inversion can occur
- starvation is possible
- Multi-Level Queue Scheduling
- multiple ready queue, threads permanently assigned to a queue, each queue has own scheduling algorithm
- another level of scheduling decides which queue goes next (usually priority based)
- Feedback Scheduling
- adjust criteria for choosing a particular thead based on past history
- Combie with MLQ to move threads between queues → multi-level feedback queue (MLFQ)
- Fair Share Scheduling
- group threads
- ensure each group has proportional share
- priority of a thread depends on its own priority and past history of whole group
- Lottery scheduling variant - each group is assigned “tickets” according to its share
- Unix CPU Scheduling
- interactive threads favoured
- small CPU time slices are given to threads by a priority algorithm that reduces to RR for CPU-bound jobs
- the more CPU time a thread accumulates, the lower its priority becomes (negative feedback)
- aging prevents starvation
- RR scheduling results from a timeout mechanism
- MLFQ with RR within each priority queue
Memory Management
- Requirements
- Relocation
- Implies address translation
- Protection
- need hardware support
- Sharing
- ability, ways to specify and control
- Logical Organization
- Physical Organizaiton
- Solutions
- virtual memory
- based on segmentation and/or paging
- simpler schemes:
- Fixed partitioning
- Dynamic partitioning
- Paging
- Segmentation
Address Binding
- address translation: processing of linking variable names to physical locations
- Timing:
- compile time → absolute code
- Load time (static relocation)
- Execution time (dynamic relocation)
Logical vs. Physical Memory
Fixed Partitioning of Physical Memory
- Concept
- Fixed partiioning
- OS one partitioning
- one partition per process
- internal fragmentation - memory wasted when process smaller than partitioning
- overlays - programmers must deal when process bigger than partitioning
- Placement
- # partition = # process
- if full, needs to swap some out
- loading
- equal sized: anyone
- unequal-sized:
- queue-per-partition
- single queue, assign process to smallest available
Dynamic Partitioning
- exact sized partition
- “holes” when process goes
- external fragmentation: holes too small for any process
- compaction: OS may move process around to create larger free space
- require process to be relocatable
- need to know max size of process at load time
- Placement algorithms
- First-fit
- Best-fit
- Worst-fit
- Quick-fit
Paging
No comments:
Post a Comment